|
| #define | MSG_CTRL_LIST msg_ctrl_vehicle_state, msg_ctrl_word, msg_ctrl_torque, msg_ctrl_cmd |
| |
| #define | PRImsg_ctrl_vehicle_state PRImsg_header "\n\r\tvelocity (m/s): %" PRImsg_2d_data |
| | Insert msg_ctrl_vehicle_state printf format string.
|
| |
| #define | PRImsg_ctrl_vehicle_state_arg(data) |
| | Insert msg_ctrl_vehicle_state arguments to printf format.
|
| |
| #define | PRImsg_ctrl_word PRImsg_header "\n\r\tcontrol word: %" PRImsg_4wheel_flags |
| | Insert msg_ctrl_word printf format string.
|
| |
| #define | PRImsg_ctrl_word_arg(data) |
| | Insert msg_ctrl_word arguments to printf format.
|
| |
| #define | PRImsg_ctrl_torque PRImsg_header "\n\r\ttarget torque (Nm): %" PRImsg_4wheel_data |
| | Insert msg_ctrl_torque printf format string.
|
| |
| #define | PRImsg_ctrl_torque_arg(data) |
| | Insert msg_ctrl_torque arguments to printf format.
|
| |
| #define | PRImsg_ctrl_cmd PRImsg_header "\n\r\trtd: %hu, emcy_stop: %hu" |
| | Insert msg_ctrl_cmd printf format string.
|
| |
| #define | PRImsg_ctrl_cmd_arg(data) |
| | Insert msg_ctrl_cmd arguments to printf format.
|
| |
| #define | CSV_PRImsg_ctrl_vehicle_state_header CSV_PRImsg_header_header "," CSV_PRImsg_2d_data_header(velocity) |
| | CSV header for msg_ctrl_vehicle_state.
|
| |
| #define | CSV_PRImsg_ctrl_vehicle_state CSV_PRImsg_header ",%" CSV_PRImsg_2d_data |
| | Insert msg_ctrl_vehicle_state CSV format string.
|
| |
| #define | CSV_PRImsg_ctrl_vehicle_state_arg(data) |
| | Insert msg_ctrl_vehicle_state arguments to CSV print format.
|
| |
| #define | CSV_PRImsg_ctrl_word_header CSV_PRImsg_header_header "," CSV_PRImsg_4wheel_flags_header(ctrl) |
| | CSV header for msg_ctrl_word.
|
| |
| #define | CSV_PRImsg_ctrl_word CSV_PRImsg_header ",%" CSV_PRImsg_4wheel_flags |
| | Insert msg_ctrl_word CSV format string.
|
| |
| #define | CSV_PRImsg_ctrl_word_arg(data) |
| | Insert msg_ctrl_word arguments to CSV print format.
|
| |
| #define | CSV_PRImsg_ctrl_torque_header CSV_PRImsg_header_header "," CSV_PRImsg_4wheel_data_header(torque) |
| | CSV header for msg_ctrl_torque.
|
| |
| #define | CSV_PRImsg_ctrl_torque CSV_PRImsg_header ",%" CSV_PRImsg_4wheel_data |
| | Insert msg_ctrl_torque CSV format string.
|
| |
| #define | CSV_PRImsg_ctrl_torque_arg(data) |
| | Insert msg_ctrl_torque arguments to CSV print format.
|
| |
| #define | CSV_PRImsg_ctrl_cmd_header CSV_PRImsg_header_header ",rtd,emcy_stop" |
| | CSV header for msg_ctrl_cmd.
|
| |
| #define | CSV_PRImsg_ctrl_cmd CSV_PRImsg_header ",%hu,%hu" |
| | Insert msg_ctrl_cmd CSV format string.
|
| |
| #define | CSV_PRImsg_ctrl_cmd_arg(data) |
| | Insert msg_ctrl_cmd arguments to CSV print format.
|
| |
Control message type definitions.
- Author
- quantumspawner
- Version
- 0.0.1
- Date
- 2025-07-13
- Copyright
- Copyright (c) 2025 NTU Racing Team
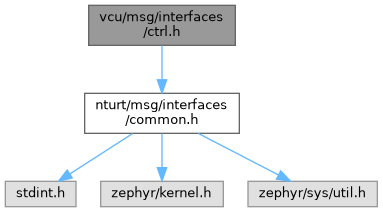
 Include dependency graph for ctrl.h:
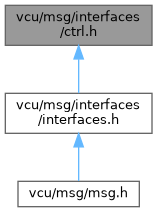
Include dependency graph for ctrl.h: