|
NTURT Zephyr v0.0.1
NTURT common library for Zephyr RTOS
|
|
NTURT Zephyr v0.0.1
NTURT common library for Zephyr RTOS
|
Sensor message type definitions. More...
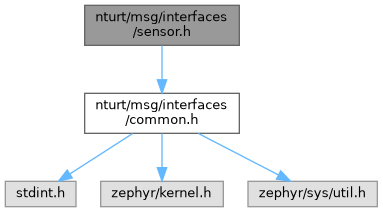
#include "nturt/msg/interfaces/common.h" Include dependency graph for sensor.h: This graph shows which files directly or indirectly include this file:
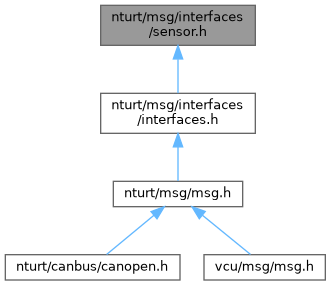
Include dependency graph for sensor.h: This graph shows which files directly or indirectly include this file:Data Structures | |
| struct | msg_sensor_cockpit |
| Cockpit sensors message. More... | |
| struct | msg_sensor_wheel |
| Wheel sensors message. More... | |
| struct | msg_sensor_imu |
| IMU message. More... | |
| struct | msg_sensor_gps |
| GPS message. More... | |
| struct | msg_sensor_pow |
| Power sensors message. More... | |
Macros | |
| #define | MSG_SENSOR_LIST |
| List of sensor messages. | |
| #define | PRImsg_sensor_cockpit |
| Insert msg_sensor_cockpit printf format string. | |
| #define | PRImsg_sensor_cockpit_arg(data) |
| Insert msg_sensor_cockpit arguments to printf format. | |
| #define | PRImsg_sensor_wheel |
| Insert msg_sensor_wheel printf format string. | |
| #define | PRImsg_sensor_wheel_arg(data) |
| Insert msg_sensor_wheel arguments to printf format. | |
| #define | PRImsg_sensor_imu |
| Insert msg_sensor_imu printf format string. | |
| #define | PRImsg_sensor_imu_arg(data) |
| Insert msg_sensor_imu arguments to printf format. | |
| #define | PRImsg_sensor_gps |
| Insert msg_sensor_gps printf format string. | |
| #define | PRImsg_sensor_gps_arg(data) |
| Insert msg_sensor_gps arguments to printf format. | |
| #define | PRImsg_sensor_pow |
| Insert msg_sensor_pow printf format string. | |
| #define | PRImsg_sensor_pow_arg(data) |
| Insert msg_sensor_pow arguments to printf format. | |
| #define | CSV_PRImsg_sensor_cockpit_header CSV_PRImsg_header_header ",steer,accel,apps1,apps2,brake,bse1,bse2" |
| CSV header for msg_sensor_cockpit. | |
| #define | CSV_PRImsg_sensor_cockpit CSV_PRImsg_header ",%f,%f,%f,%f,%f,%f,%f" |
| Insert msg_sensor_cockpit CSV format string. | |
| #define | CSV_PRImsg_sensor_cockpit_arg(data) |
| Insert msg_sensor_cockpit arguments to CSV print format. | |
| #define | CSV_PRImsg_sensor_wheel_header |
| CSV header for msg_sensor_wheel. | |
| #define | CSV_PRImsg_sensor_wheel |
| Insert msg_sensor_wheel CSV format string. | |
| #define | CSV_PRImsg_sensor_wheel_arg(data) |
| Insert msg_sensor_wheel arguments to CSV print format. | |
| #define | CSV_PRImsg_sensor_imu_header |
| CSV header for msg_sensor_imu. | |
| #define | CSV_PRImsg_sensor_imu |
| Insert msg_sensor_imu CSV format string. | |
| #define | CSV_PRImsg_sensor_imu_arg(data) |
| Insert msg_sensor_imu arguments to CSV print format. | |
| #define | CSV_PRImsg_sensor_gps_header CSV_PRImsg_header_header ",longitude,latitude" |
| CSV header for msg_sensor_gps. | |
| #define | CSV_PRImsg_sensor_gps CSV_PRImsg_header ",%.7f,%.7f" |
| Insert msg_sensor_gps CSV format string. | |
| #define | CSV_PRImsg_sensor_gps_arg(data) |
| Insert msg_sensor_gps arguments to CSV print format. | |
| #define | CSV_PRImsg_sensor_pow_header CSV_PRImsg_header_header ",in_volt,v5_curr,v5_rpi_curr" |
| CSV header for msg_sensor_pow. | |
| #define | CSV_PRImsg_sensor_pow CSV_PRImsg_header ",%f,%f,%f" |
| Insert msg_sensor_pow CSV format string. | |
| #define | CSV_PRImsg_sensor_pow_arg(data) |
| Insert msg_sensor_pow arguments to CSV print format. | |
Sensor message type definitions.